



Media for Antenna Reconfiguration Paper
PUBLICITY INFORMATION FOR: Mongeau, J.-M., Demir, A., Lee, J., Cowan, N. J. and Full, R. J. (2013). Locomotion and mechanics mediated tactile sensing: antenna reconfiguration simplifies control during high-speed navigation in cockroaches. J. Exp. Biol. 216, XXXX-XXXX.
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until Wednesday, December 4, 2013 at 6 PM EST. Any access to this information is logged.
SHOULD YOU HAVE REACHED THIS WEBSITE BY ACCIDENT PLEASE CONTACT pauline@berkeley.edu.
Please note: This article is posted on this site to give advance access to other authorised media who may wish to report on this story. Full attribution is required, and if reporting online a link to jeb.biologists.com is also required. The story posted here is COPYRIGHTED. Therefore advance permission is required before any and every reproduction of each article in full. PLEASE CONTACT permissions@biologists.com THIS ARTICLE IS EMBARGOED UNTIL WEDNESDAY, 4 December 2013, 18:00 HRS EST (23:00 HRS GMT)
Info for journalists ONLY: Full text of the article is available ON REQUEST. To obtain a copy contact Kathryn Knight, The Journal Of Experimental Biology, Cambridge, UK. Tel: +44 (0)1223 425525 or email kathryn@biologists.com.
Authors
Jean-Michel Mongeau. Biophysics Graduate Group, University of California, Berkeley, CA 94720, USA.
A. Demir. Department of Mechanical Engineering, Johns Hopkins University, MD 21218, USA
Jusuk Lee. Department of Mechanical Engineering, Johns Hopkins University, MD 21218, USA
Noah J. Cowan. Department of Mechanical Engineering, Johns Hopkins University, MD 21218, USA email: ncowan@jhu.edu
Robert Full. Department of Integrative Biology, University of California at Berkeley, CA 94720-3140. Phone ++1 510 642 9896 (office) or ++510-332-7484 (mobile) e-mail: rjfull@berkeley.edu
Center for Interdisciplinary Bio-inspiration in Education and Research Visit CiBER Center for Learning from Nature
UC Berkeley’s PolyPEDAL Lab Visit
Johns Hopkins’s LIMBS Lab Visit
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE JEB ARTICLE SHOULD BE CREDITED AS COPYRIGHT xxxxx. ALL OTHER MATERIAL SHOULD BE CREDITED AS “Courtesy of PolyPEDAL Lab” WITH PHOTO CREDIT IF INCLUDED.”
Figures from Paper
Figure 1

Figure 2

Experimental setup to study high-speed wall following. (A) Arena with a turn perturbation for eliciting high-speed escape and wall following in P. americana. We recorded the time prior to and after a turn using two synchronized high-speed video cameras. Setup adapted from Cowan et al. (Cowan et al., 2006). (B) Kinematic parameters evaluated for wall following. We digitized the two markers on the cockroach body (large white circles) to extract the point of rotation (POR; small circle with arrow) and body angle θ relative to the wall. v is the forward velocity of the animal; d is the distance from the antenna to the wall.
Figure 3

Methods for determining the mechanical role of hairs. (A) Procedure for laser hair ablation. The body and antennae of cockroaches were restrained on an x–y stage while we applied laser pulses at the tip of the antenna on both the ventral and dorsal sides. The inset shows high-resolution images of the three distal-most annuli of a cockroach antenna viewed from the ventral position. The top image shows the antenna before hair ablation and the bottom image shows the same antenna annuli after laser hair ablation. (B) Experimental procedure for determining the role of hairs in reconfiguring the antenna. We mounted body- and antenna-fixed animals on a platform and allowed the tip of the antenna to slide along a rough (paraffin) wall mounted on a motorized stage. The inset shows a drawing of a treated antenna prior to interacting with the wall.
Figure 4

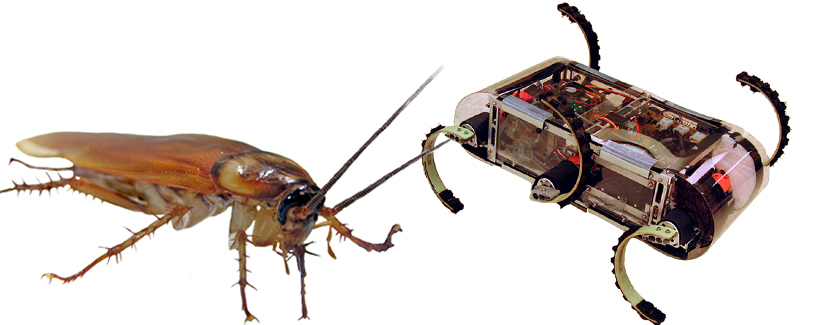
Physical model of the antenna. (A) Physical model for independently testing the hypothesis that hairs facilitate the passive reconfiguration of an antenna. The eight-segment robotic antenna with anisotropic hairs is tangent to a felt-cloth-covered wall in the forward-projecting posture. (B) Close-up of the robotic antenna showing the inter-segmental joints and the collapsing direction of a hair. (C) Computer-aided design (CAD) rendering of a single antenna segment with anisotropic hairs: (1) NiTi hair tip and stiffness element; (2) hair; (3) hair 45° hard stop; (4) segment cover; (5) hair slots; (6) contact sensor.
Figure 5

Effect of wall properties on antenna mechanical state. (A) Two wall-following sequences during a turn perturbation recorded from high-speed video. The left panel shows a cockroach running with its antenna bent, projecting backward, whereas the right panel shows the same animal in a different trial running with the antenna straight, projecting forward. Wall properties are the same for the two trials. Boxes with dashed lines highlight the shape of the antenna as it interacts with the wall. (B) Proportion of antennae pointing forward, backward or flipping for smoother and rougher wall surfaces. Wall surfaces categorically affected the antenna state (P<0.001). (C) Transition probabilities within and between states by modeling antenna reconfiguration as a two-state discrete Markov chain. Transition probabilities calculated from the transition matrices for both smoother and rougher walls are shown by arrows.
Figure 6

Locomotor performance as a function of antenna mechanical state. (A) Body-to-wall distance of cockroaches wall following for antennae projecting backward or forward as a function of time following a turn perturbation. The shaded blue and red regions show the full range of body-to-wall distances while individual lines represent single trials. Animals running with an antenna projecting forward following a turn ran significantly closer to the wall than animals running with an antenna projecting backward (P<0.001). (B) The box plot summarizes body-to-wall distances shown in A for backward and forward groups. (C) Proportion of trials where the leg and/or body contacted the wall for strides with forward- and backward-projecting antennae. Overall, the antenna state had a statistically significant association on the frequency of leg and body contacts (P<0.001). (D, top) Body angles for animals running while the antenna flipped from forward to backward projecting. Individual lines represent single trials. The vertical dashed line represents the onset of the antenna flip. (Bottom) Body angles for the non-flip control group. Individual lines are randomly selected trials where the antenna remained backward. The vertical dashed line represents randomly selected time events. Positive angles indicate the cockroach was turning away from the wall and negative angles indicate the cockroach was turning toward the wall. (E) The box plot summarizes the bootstrapped body angles (absolute value) following a flip and for non-flip controls. Angles were statistically significant when comparing 95% confidence intervals. For box plots in B and F the central line is the median, the bottom and top edges of the box are the 25th and 75th percentiles and the whiskers extend to ±2.7 s.d. Red crosses represent outliers lying outside whiskers.
Figure 7

Sufficiency of antenna hairs in mediating an antenna ‘flip’ from the forward to backward state in biological and robotic experiments. (A) Sequence of a flip from a non-treated, intact (control) cockroach antenna. The antenna is initially in a forward projecting state. As the wall moves, the antenna catches and flips to a backward-projecting state. (B) Proportion of flips between non-treated and treated cockroach antennae. The proportion of non-laser-treated (intact) antennae that flipped was statistically higher than for treated antennae (*P<0.001). (C,D) Data from individual joint angle sensors from the robotic antenna during an experimental trial from time t0 until tfinal, where d is the distance between the base of the antenna and the wall. A flip is registered when the anchored segment (most distal) is perpendicular to the wall. In C, at tflip the distally oriented hairs engage with the wall, which results in the antenna transitioning (yellow) from a forward (pink)- to a backward (green)-projecting position. During this trial the wall was covered with rough felt cloth and the hairs were oriented distally. In D, the wall was covered with felt cloth and the three distal-most hairs of the robotic antenna were removed. This panel shows a failed transition from experimental data as the antenna remains forward projecting (pink) during the entire trial. When the antenna interacted with the felt-cloth wall, it resulted in a failed transition (arrow). (E) Data from one trial in which robotic antennal hairs ipsilateral to the wall were pointing distally while those on the other side were pointing proximally. After the antenna flipped, the proximally pointing hairs engaged, causing the contact point to move behind the base and thus significantly affecting the preview distance.
COPYRIGHT Journal of Experimental Biology 2013. To view Figure full-size, please click on the image above.
Movies
Blinded American cockroach Periplaneta americana is running at high-speed while following a wall using its antennae. The first sequence is in real-time. The second sequence is slowed 20X.
A single hair sensillum is displaced at the tip of the antenna using a small insect pin. Hairs resist bending in one direction, but collapse toward flagellum in other.
A rough surface slides along a cockroach antenna. Hairs readily engage in soft surfaces with high friction and/or asperities.
A freshly-ablated antenna is reconfigured by moving a rough substrate.
An ablated antenna can bend passively while brushing against a rough wall. The performance is comparable to natural running.
Hairs enhance probability of sensor reconfiguration on physical model of biological antenna. The video is sped up 3X.
Movie 7
Cockroach running along walls with different friction. Surface friction is sufficient to reconfigure antenna. In order (right to left) 1: acrylic (smooth) 2: plastic with graphite (slippery) 3: sandpaper (rough)
Summary of findings
Additional Images
Images
Please click on an image to view the full-resolution version.
-

Side view of the American cockroach Periplaneta americana. The antennae of this cockroach are about 1.3X body length, thus giving these animals a long preview distance. Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab UC Berkeley.

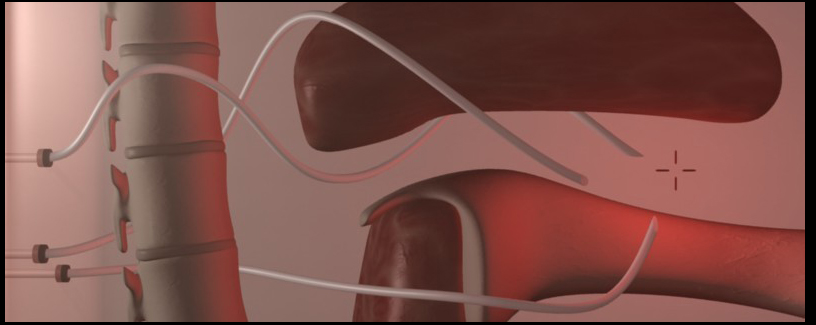
Tip of the antenna of the American cockroach. Top: Intact antenna Bottom: Antenna after laser hair removal. Each segment (or annulus) is ~400 micron long while hairs vary in length (up to about 120 microns). Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab UC Berkeley.

Distal region of antenna of American cockroach under a microscope. Each segment (or annulus) is ~400 micron long while hairs vary in length (up to about 120 microns). Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab UC Berkeley.



Contact Information for Comments on Article
Professor Thomas L. Daniel
Biology Department
University of Washington
Seattle WA 98195-1800
Phone (206) 543-1659
e-mail: danielt@u.washington.edu
Dr. Andrew Spence
RCUK Academic Research Fellow
Structure and Motion Laboratory
Royal Veterinary College
Hawkshead Lane, North Mymms, Hatfield
Hertfordshire AL9 7TA
Phone: +44 (0)1707 66 6988
e-mail: aspence@rvc.ac.uk
Volker Dürr
Biological Cybernetics
Department of Biology
Universität Bielefeld
Bielefeld, Germany
Phone: +49 (0)521 – 106 5528
e-mail: volker.duerr@uni-bielefeld.de
Professor Sanjay Sane
National Centre for Biological Sciences
Tata Institute of Fundamental Research
GKVK, Bellary Road,
Bangalore 560065, India
e-mail: sane@ncbs.res.in
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).

