



2025 J. Exp. Biol & Science Robotics Publications
Publications Included on this Page:
- Journal Experimental Biology – Stabilization of above-branch landing by free-ranging squirrels using nonprehensile, palmar foot grasps [Jump to Publicity Information]
- Science Robotics – Monopedal robot branch-to-branch leaping and landing inspired by squirrel balance control [Jump to Publicity Information]
Journal Experimental Biology – Stabilization of above-branch landing by free-ranging squirrels using nonprehensile, palmar foot grasps
PUBLICITY INFORMATION FOR: Lee, S., Wang, S., Kuang, D., Yim J., Wang, E., Hunt, N., Fearing, R., Stuart, H., and Full, R.J. (2025). J. Exp. Biol., https://journals.biologists.com/jeb/article/doi/10.1242/jeb.249934/367220/Free-ranging-squirrels-perform-stable-above-branch, DOI: 10.1242/jeb.249934, [PDF]
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until [insert time] (EST) [Wednesday March 19th, 2025]. Any access to this information is logged.
SHOULD YOU HAVE REACHED THIS WEBSITE BY ACCIDENT PLEASE CONTACT pauline@berkeley.edu.
Please note: The content of any press release and related material is embargoed with immediate effect until (EST) [Wednesday March 19th, 2025]. For more information, see embargo policy of J. Exp. Biol.
The paper will be published online and will be citable via https://journals.biologists.com/jeb/article/doi/10.1242/jeb.249934/367220/Free-ranging-squirrels-perform-stable-above-branch, DOI: 10.1242/jeb.249934, [PDF].
Contact Information for Comments
Authors
Sebastian D. Lee. Department of Mechanical Engineering. University of California at Berkeley, Berkeley, CA, USA.
Stanley Wang. Department of Mechanical Engineering. Stanford University, CA, USA.
Duyi Kuang. Department of Organismic and Evolutionary Biology, Harvard University. MA, USA.
Eric K. Wang. Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA.
Justin K. Yim. Department of Mechanical Science and Engineering. University of Illinois Urbana-Champaign, Urbana, Illinois, USA. ++1 217-265-0093, e-mail: justin.ks.yim@gmail.com
Nathaniel H. Hunt. Department of Biomechanics, University of Nebraska, Omaha, Omaha, NE, USA. Phone ++1 402-417-8928
Ronald S. Fearing. Department of Electrical Engineering and Computer Science. University of California at Berkeley, Berkeley, CA, USA. e-mail: ronf@berkeley.edu
Hannah S. Stuart, Department of Mechanical Engineering. University of California at Berkeley, Berkeley, CA, USA.
Robert J. Full. Department of Integrative Biology, University of California at Berkeley, CA, USA. Phone ++1 510 642 9896 (office) or ++1 510-332-7484 (mobile) e-mail: rjfull@berkeley.edu
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE J. EXP. BIOL. ARTICLE SHOULD BE CREDITED AS COPYRIGHT J. EXP. BIOL. 2025. ALL OTHER MATERIAL SHOULD BE CREDITED AS STATED WITH PHOTO CREDIT IF INCLUDED.
Figures from Paper
Please click on a figure to view the full-resolution version.

Fig. 1 COPYRIGHT Company of Biologists, 2025. To view Figure 1 in full-size, please click on the image above.
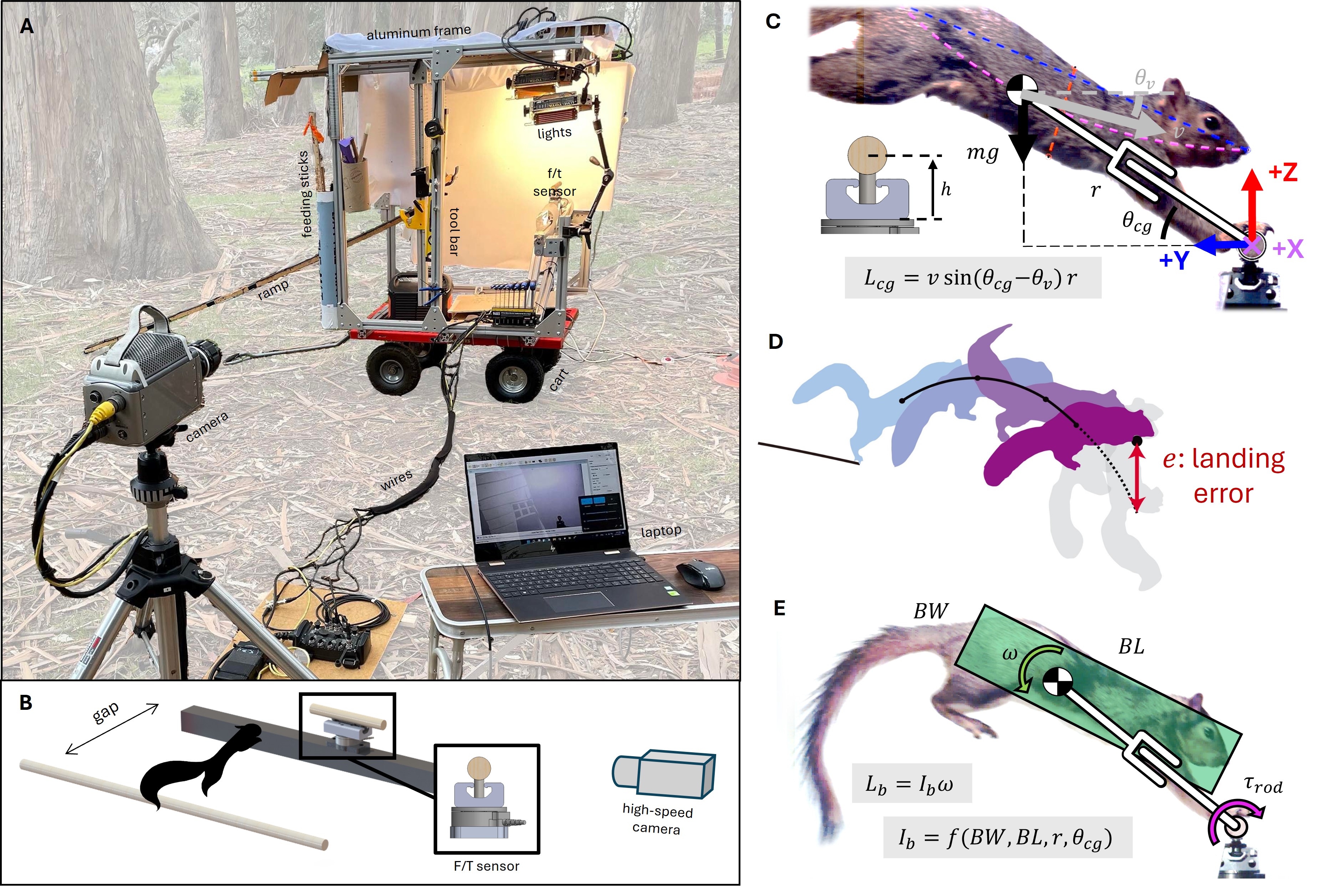
Fig. 2 COPYRIGHT Company of Biologists, 2025. To view Figure 2 in full-size, please click on the image above.
Fig. 3 COPYRIGHT Company of Biologists, 2025. To view Figure 3 in full-size, please click on the image above.
Fig. 4 COPYRIGHT Company of Biologists, 2025. To view Figure 4 in full-size, please click on the image above.
Fig. 5 COPYRIGHT Company of Biologists, 2025. To view Figure 5 in full-size, please click on the image above.
Fig. 6 COPYRIGHT Company of Biologists, 2025. To view Figure 6 in full-size, please click on the image above.
Fig. 7 COPYRIGHT Company of Biologists, 2025. To view Figure 7 in full-size, please click on the image above.
Movies from Paper
Movie 1. [Download here]
Additional Images
Please click on an image to view the full-resolution version.

Photo 1: Fox squirrel in eucalyptus grove on the UC Berkeley campus. Credit: Photo by Judy Jinn, UC Berkeley.

Photo 2: Fox squirrel in eucalyptus grove on the UC Berkeley campus. Credit: Photo by Jeremy Snowden, UC Berkeley


Additional Movies
Additional movie 1. Experimental Setup for recording leg forces in a Eucalyptus Grove. [Download here]
Contact Information for Comments on Article from Investigators Not Involved in this Research
Professor Manny Azizi (comparative biomechanics, landing)
Department of Ecology and Evolution
University of California, Irvine
E-mail: eazizi@uci.edu
Professor Jake Socha (comparative biomechanics, gap-crossing)
Department of Biomedical Engineering and Mechanics
Virginia Tech University
E-mail: jjsocha@vt.edu
Professor Andrew Biewener (comparative biomechanics, mammalian jumping)
The Department of Organismic and Evolutionary Biology
Harvard University
E-mail: aabiewener@oeb.harvard.edu
Professor Greg Byrnes (comparative biomechanics, flying squirrels)
Biology Department
Siena College
E-mail: gbyrnes@siena.edu
Science Robotics – Monopedal robot branch-to-branch leaping and landing inspired by squirrel balance control
PUBLICITY INFORMATION FOR: Yim, J.K, Wang, E.K., Lee, S.D, Hunt, N., Full, R.J., amd Fearing, R.S (2025). Science Robotics, http://www.science.org/doi/10.1126/scirobotics.adq1949, DOI: doi/10.1126/scirobotics.adq1949, [PDF]
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until 14:00 (2:00 pm) EST on Wednesday March 19th, 2025. Any access to this information is logged.
SHOULD YOU HAVE REACHED THIS WEBSITE BY ACCIDENT PLEASE CONTACT pauline@berkeley.edu.
Please note: The content of any press release and related material is embargoed with immediate effect until 14:00 (2:00 pm) EST on Wednesday March 19th, 2025. For more information, see embargo policy of Science.
The paper will be published online and will be citable via http://www.science.org/doi/10.1126/scirobotics.adq1949, DOI: doi/10.1126/scirobotics.adq1949, [PDF].
Contact Information for Comments
Authors
Justin K. Yim. Department of Mechanical Science and Engineering. University of Illinois Urbana-Champaign, Urbana, Illinois, USA. Phone ++1 217-265-0093, e-mail: justin.ks.yim@gmail.com
Eric K. Wang. Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA.
Sebastian D. Lee. Department of Mechanical Engineering. University of California at Berkeley, Berkeley, CA, USA.
Nathaniel H. Hunt. Department of Biomechanics, University of Nebraska, Omaha, Omaha, NE, USA. Phone ++1 402-417-8928
Robert J. Full. Department of Integrative Biology, University of California at Berkeley, CA, USA. Phone ++1 510 642 9896 (office) or ++1 510-332-7484 (mobile) e-mail: rjfull@berkeley.edu
Ronald S. Fearing. Department of Electrical Engineering and Computer Science. University of California at Berkeley, Berkeley, CA, USA. e-mail: ronf@berkeley.edu
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE SCIENCE ROBOTICS ARTICLE SHOULD BE CREDITED AS COPYRIGHT SCIENC ROBOTICS 2025. ALL OTHER MATERIAL SHOULD BE CREDITED AS STATED WITH PHOTO CREDIT IF INCLUDED.
Figures from Paper
Please click on a figure to view the full-resolution version.
Fig. 1 COPYRIGHT Science, 2025. To view Figure 1 in full-size, please click on the image above.
Fig. 2 COPYRIGHT Science, 2025. To view Figure 2 in full-size, please click on the image above.
Fig. 3 COPYRIGHT Science, 2025. To view Figure 3 in full-size, please click on the image above.
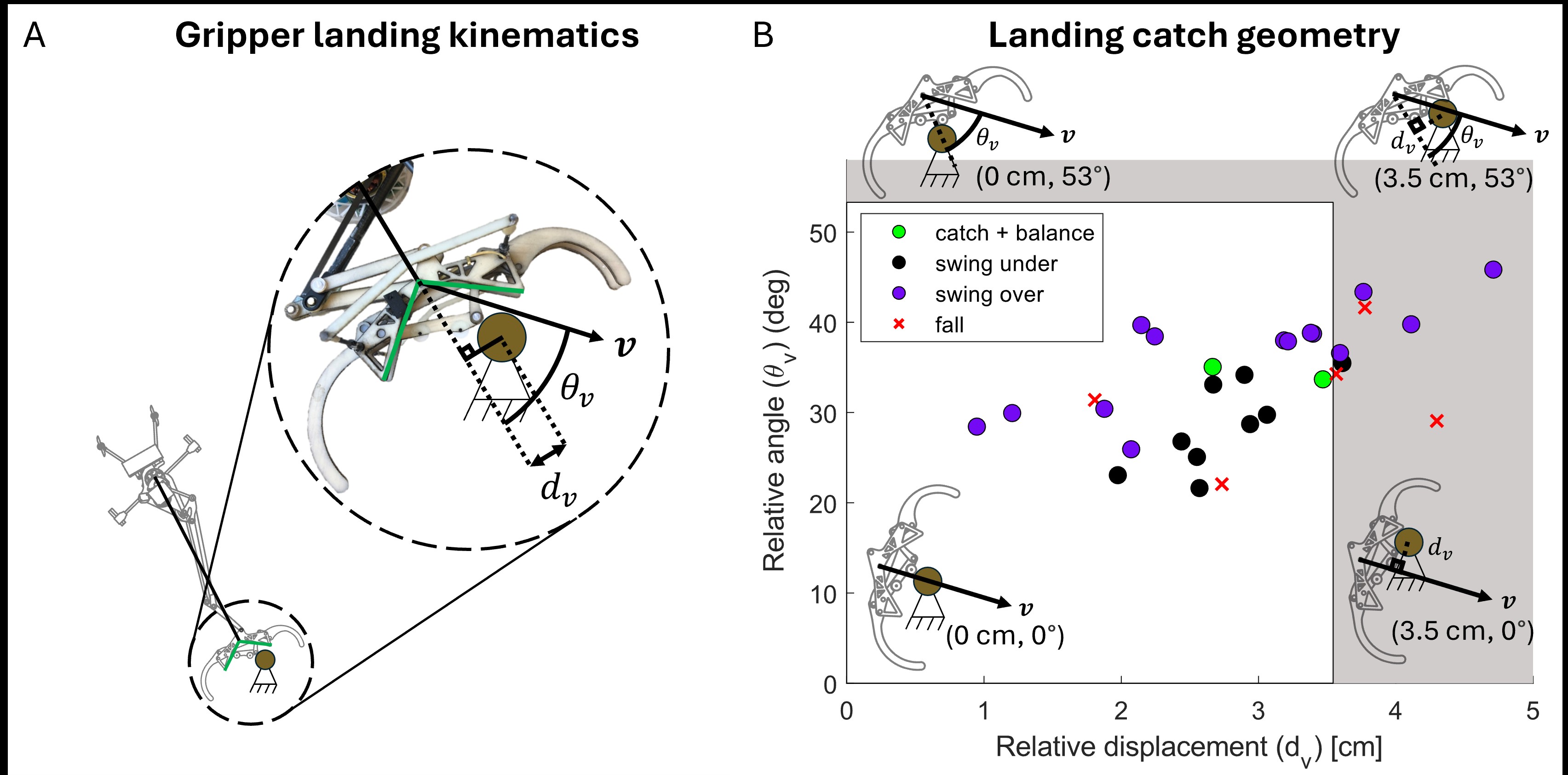
Fig. 4 COPYRIGHT Science, 2025. To view Figure 4 in full-size, please click on the image above.
Fig. 5 COPYRIGHT Science, 2025. To view Figure 5 in full-size, please click on the image above.
Fig. 6 COPYRIGHT Science, 2025. To view Figure 6 in full-size, please click on the image above.
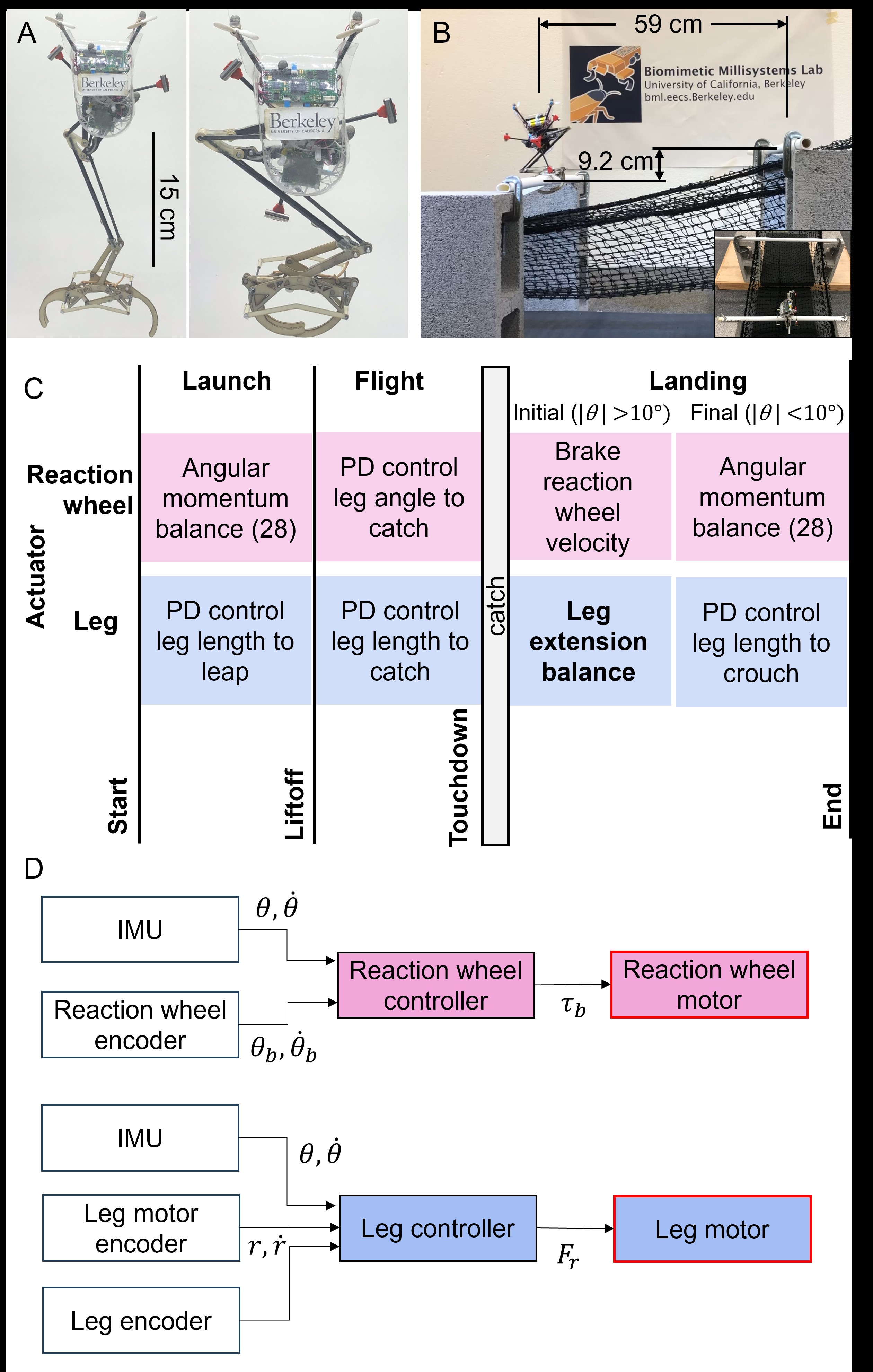
Fig. 7 COPYRIGHT Science, 2025. To view Figure 7 in full-size, please click on the image above.
Movies from Paper
Movie 1. [Download here]
Additional Images
Please click on an image to view the full-resolution version.

Photo 1: Monopod robot, Salto, with gripper open. Credit: Photo by Justin Yim, UC Berkeley.
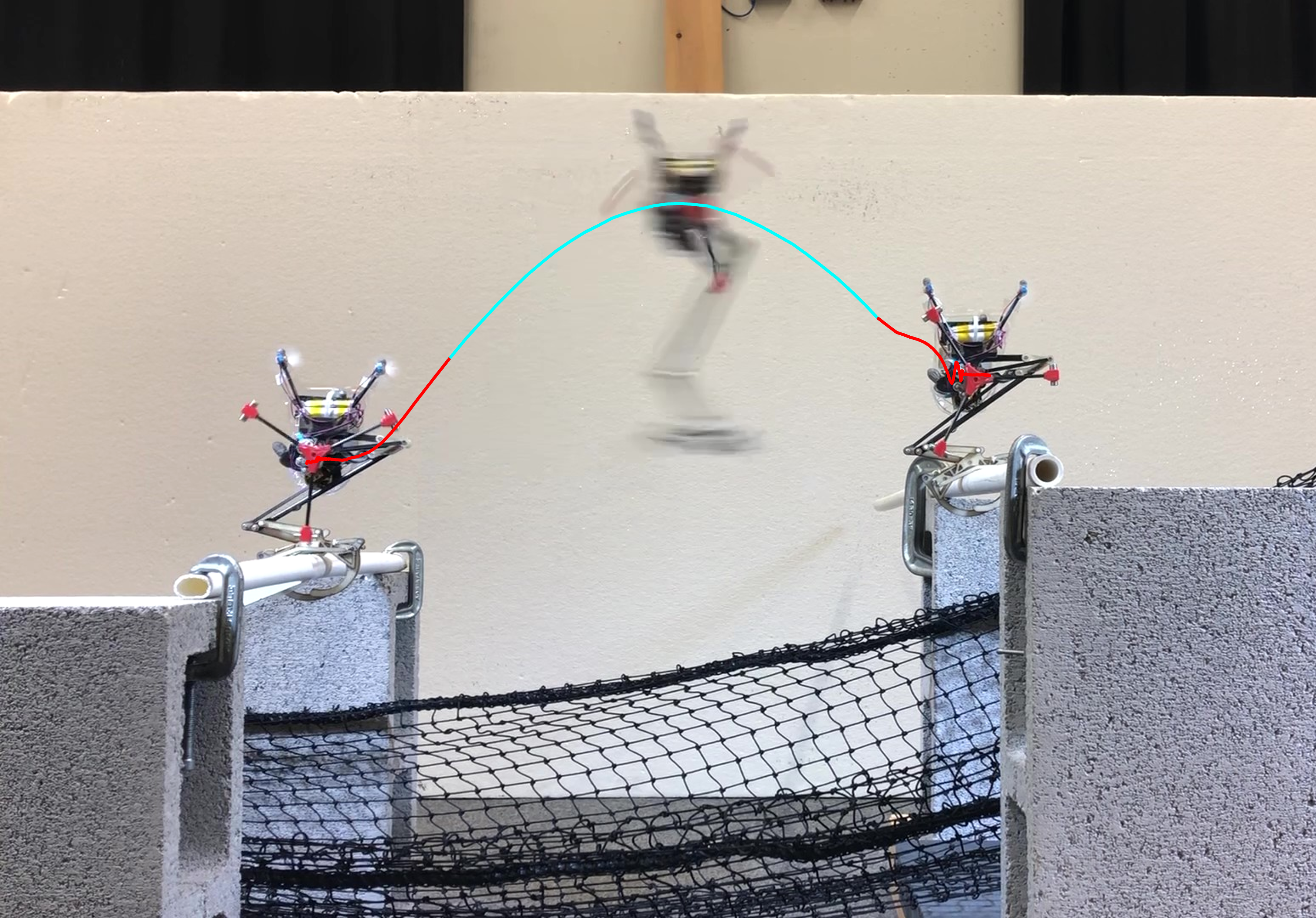
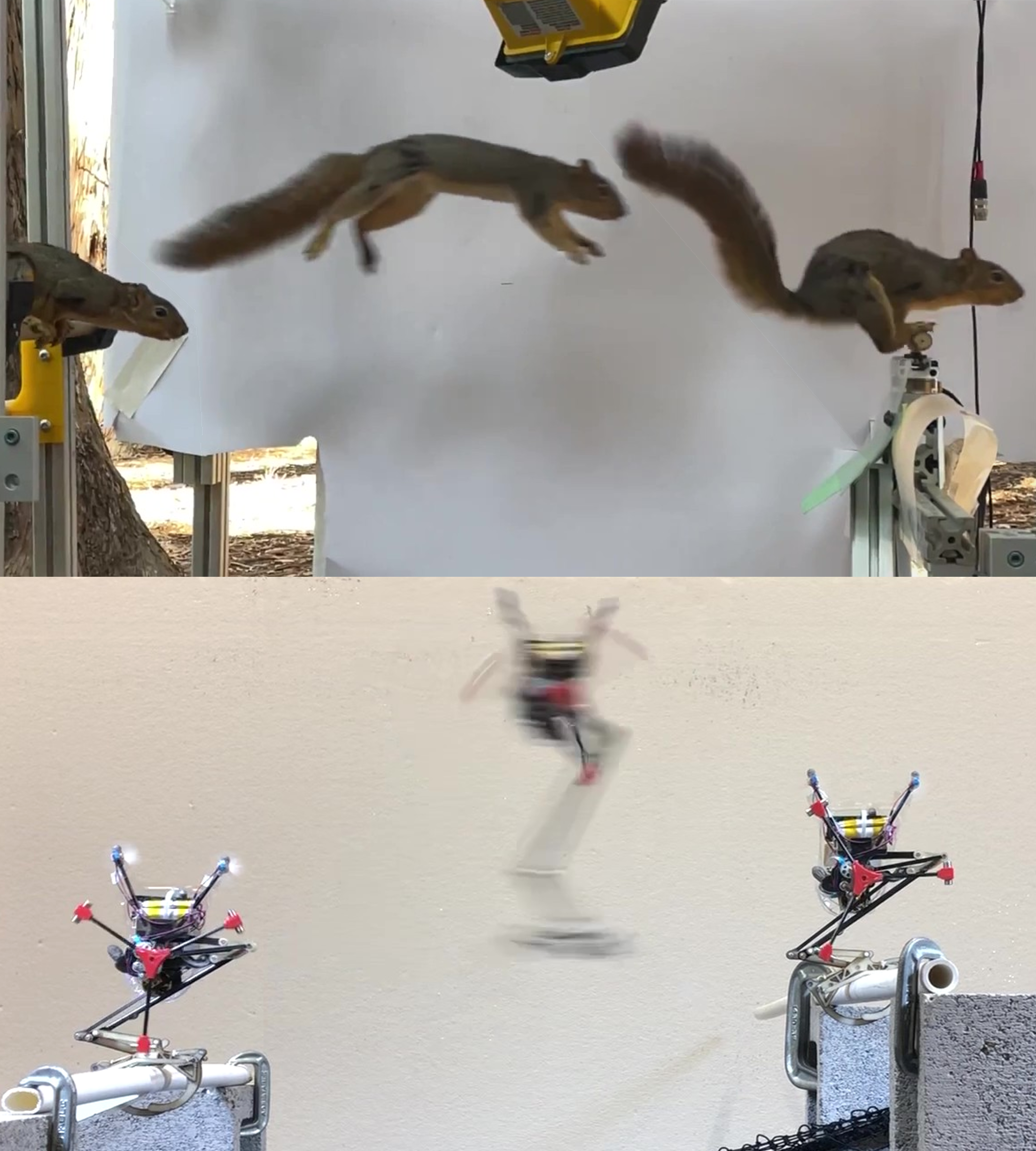
Photo 2: Monopod robot, Salto, completing a branch-to-branch balanced landing. Credit: Photo by Justin Yim, UC Berkeley.
Additional Movies
Contact Information for Comments on Article from Investigators Not Involved in this Research
Professor Raphael Zufferey (ornithopter perching, aerial and aquatic robots)
Department of Mechanical Engineering
Massachusetts Institute of Technology
Email: raphz@mit.edu
Professor Elliot Hawkes (soft robots, jumping robot mechanisms)
Department of Mechanical Engineering
University of California, Santa Barbara
Email: ewhawkes@ucsb.edu
Professor Kyujin Cho (bioinspired robots, jumping robot mechanisms)
School of Mechanical and Aerospace Engineering
Seoul National University
Email: kjcho@snu.ac.kr
Professor Mark Cutkosky (bioinspired robots, perching)
Department of Mechanical Engineering
Stanford University
Email: cutkosky@stanford.edu
Professor Sangbae Kim (legged robot design, legged robot control)
Department of Mechanical Engineering
Massachusetts Institute of Technology
Email: sangbae@mit.edu
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).

